For Data Acquisition and Data pre-processing click here.
Class definition
Semantic annotation of the point clouds according to a CityGML Level Of Detail 3/4 has been defined. In addition to this open data model, IFC standard and the AAT (Art and Architecture Thesaurus) has been taken into account.
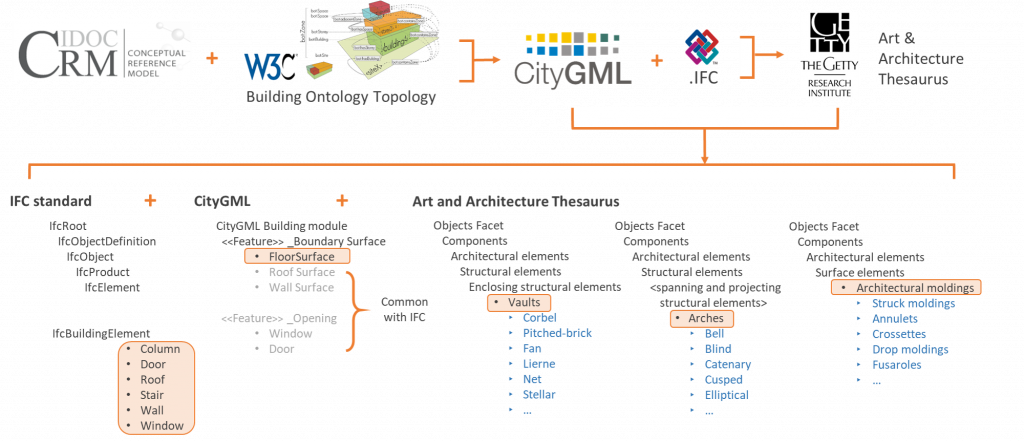
9 classes have been therefore selected, plus another one defined as “other”, containing all the points not belonging to the previous classes (e.g. paintings, altars, benches, statues, waterspouts…).
"arch":0, "column":1, "moldings":2, "floor":3, "door_window":4, "wall":5, "stairs":6, "vault":7, "roof":8, "other":9
These classes have been used for the point clouds labelling. Nevertheless, the possibility of further extending this scheme for a higher Level of Detail (LOD 4/5), to be exploited for Instance Segmentation, is planned.
Dataset
The dataset is composed of 17 annotated and another 10 non-annotated point clouds, the latter of which could be labelled by users and added to the main dataset.
Many of the scenes included in the ArCH benchmark are part (or a candidate) of the UNESCO World Heritage List (WHL):
- the chapel of the Strasbourg Cathedral inside the Grande Île, inscribed in 1988;
- the courtroom of the Valentino’s Castle (VAL) included in the “Residences of the Royal House of Savoy” from 1997;
- the Sacro Monte of Varallo (SMV) and Ghiffa (SMG) part of the wider site of “Sacri Monti of Piedmont and Lombardy” from 2003;
- St. Pierre church located inside the Neustadt inscribed in 2017;
- the porticoes of Bologna presented as a candidate in 2020.
Other scenes are nevertheless part of historical built heritage and represent various historical periods and architectural styles. This difference could constitute a drawback in the definition of the dataset classes, as it introduces elements of inhomogeneity within the same classes. However, providing the neural network with differing elements improves its ability to generalise among various CH case studies.
Among the labelled scenes of the benchmark, 15 scenes are available for training and 2 for testing. They all include churches, chapels, porticoes, loggias, pavilions and cloisters.
The 2 test scenes (named A and B) have different characteristics:
- the first (A_SMG_portico) represents a simple, almost symmetrical building on one level and with more standard and repetitive geometric elements;
- the second (B_SMV_chapel_27to35) represents a complex, non-symmetrical building, structured on two levels, surveyed both indoor and outdoor, with different types of vaults, stairways and windows.
These two test scenes were chosen to (i) simplify the comparisons of the results, (ii) assess the effectiveness of the proposed algorithms and (iii) try to highlight the generalisation and learning capability of the networks not only on a relatively simple scene but also on a complex one.

1_TR_cloister 
2_TR_church 
Valentino’s Castle 
3_VAL_room 
4_CA_church 
4_CA_church apse 
5_SMV_chapel_1 
6_SMV_chapel_2to4 
6_SMV_chapel_2to4_ porch 
7_SMV_chapel_24 
8_SMV_chapel_28 
9_SMV_chapel_10 
10_SStefano_portico_1 
11_SStefano_portico_2 
12_KAS_pavillion_1 
13_KAS_pavillion_2 
14_TRE_square 
15_OTT_church outdoor 
15_OTT_church indoor 
A_SMG_portico 
A_SMG_portico 
B_SMV_chapel_27to35 north side 
B_SMV_chapel_27to35 south side 
B_SMV_chapel_27to 35 loggia
























Skip to Download
Training

| Name | Preview | N. of points | Scene | Data acquisition | N. of classes (excluded “other”) | subsampling (cm) |
|---|---|---|---|---|---|---|
| 1_TR_cloister |  | 15,740,229 | Indoor/outdoor | TLS + UAV | 8/9 | 1 |
| 2_TR_church | 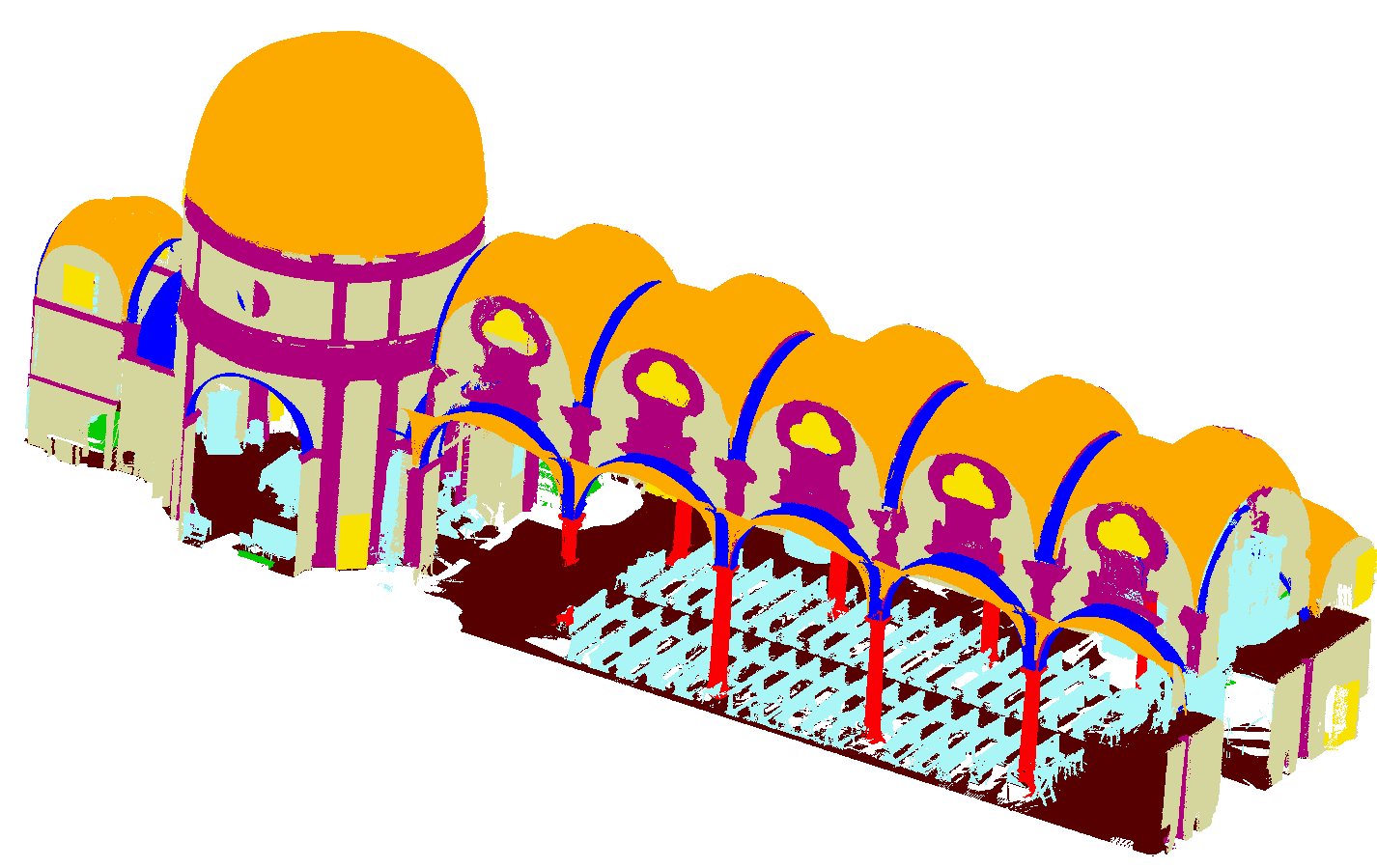 | 20,862,139 | Indoor | TLS | 8/9 | 1 |
| 3_VAL_room |  | 4,188,066 | Indoor | TLS | 6/9 | 1 |
| 4_CA_church | 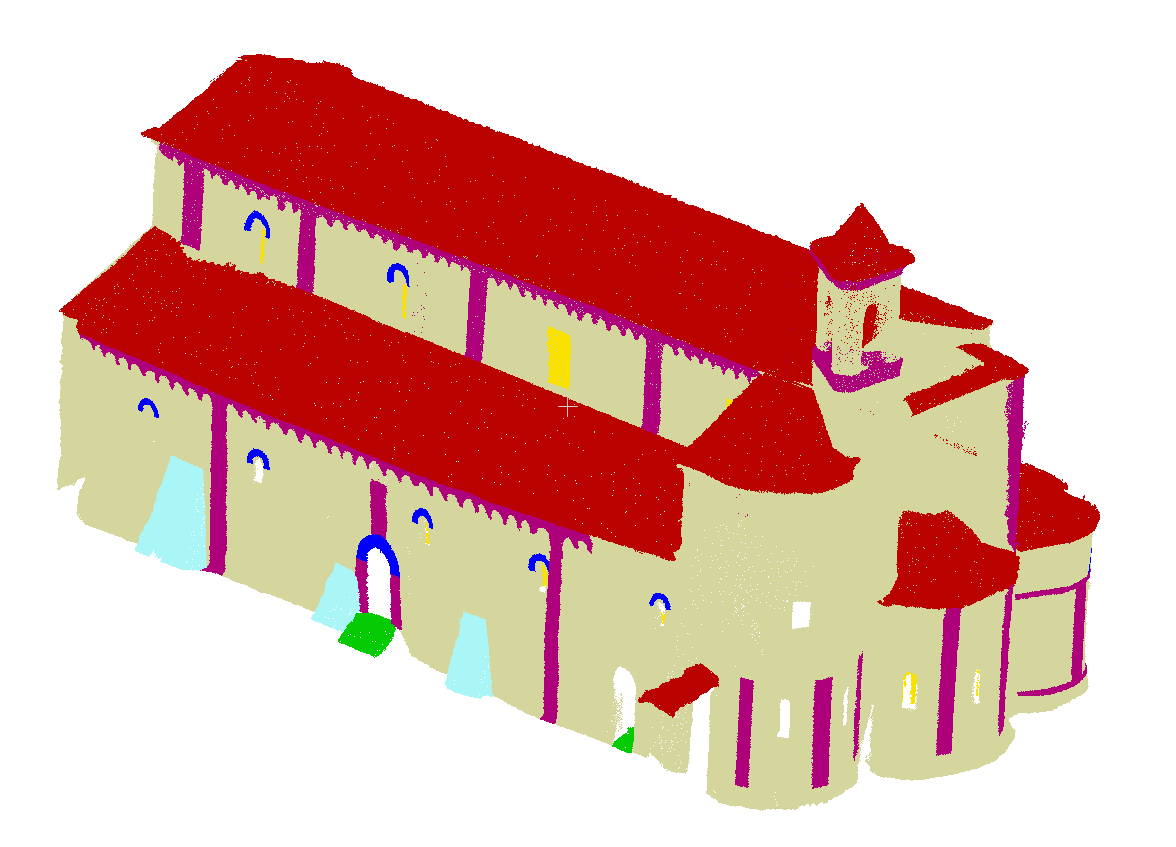 | 4,850,807 | Outdoor | TLS + UAV | 6/9 | 1 |
| 5_SMV_chapel_1 | 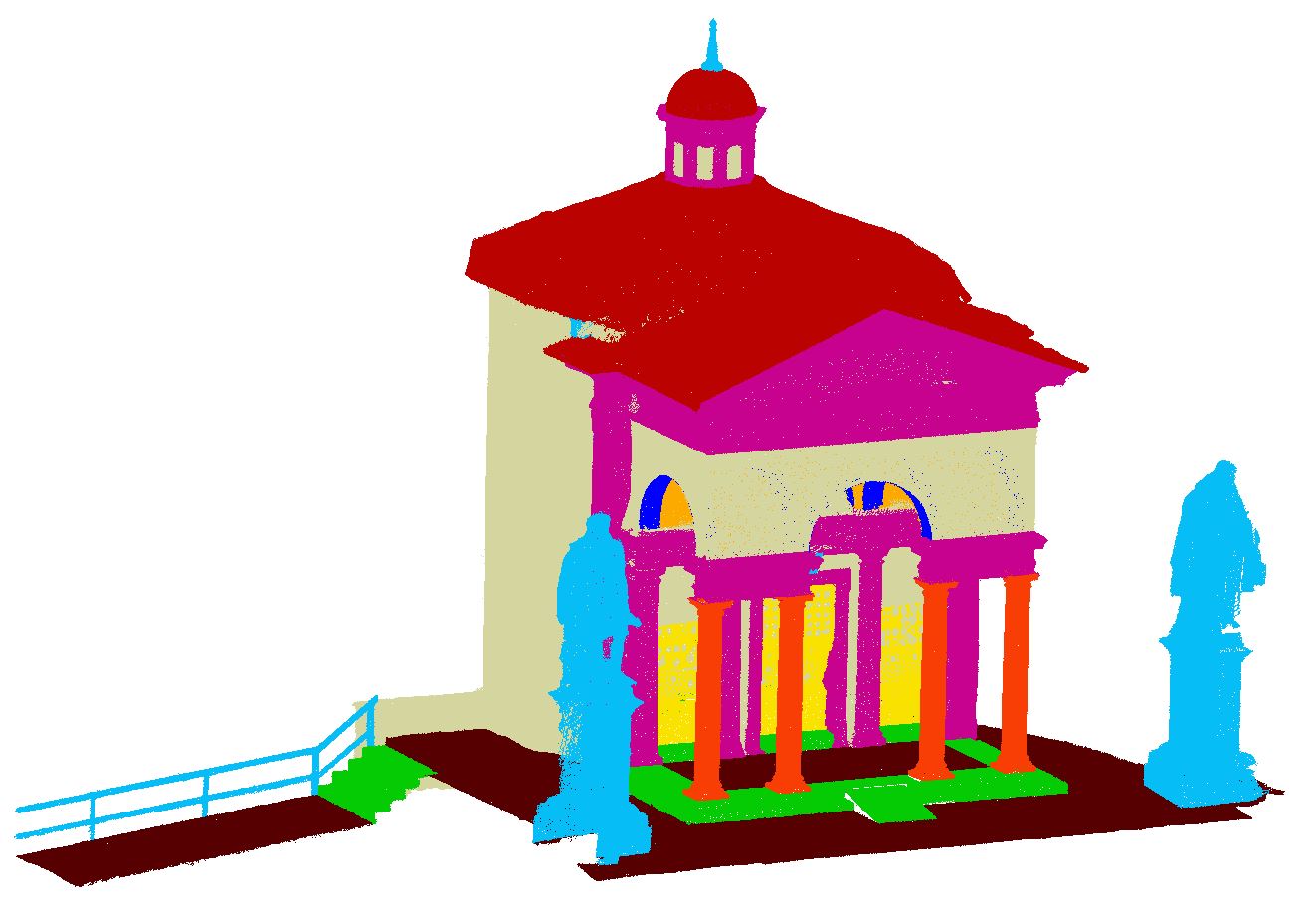 | 3,783,412 | Outdoor | TLS + UAV | 9/9 | 1 |
| 6_SMV_chapel_2to4 | 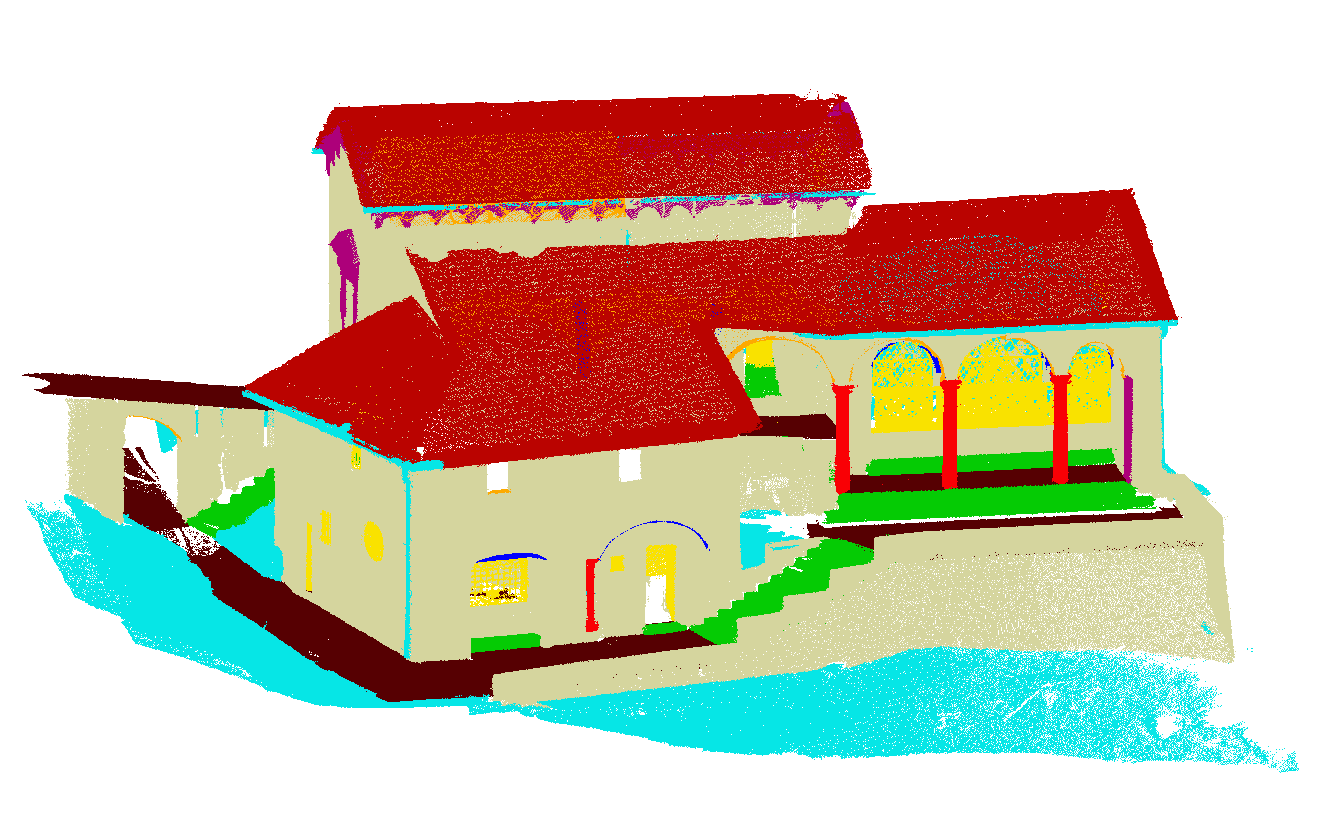 | 6,326,871 | Indoor/Outdoor | TLS + UAV | 9/9 | 1 |
| 7_SMV_chapel_24 | 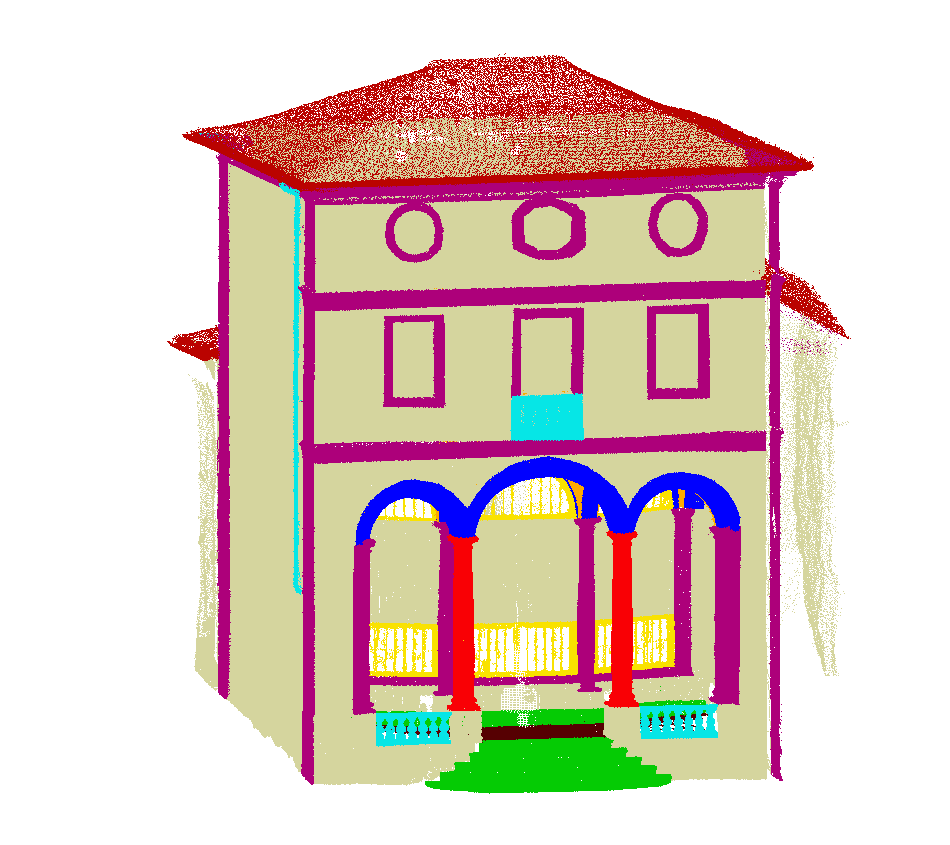 | 3,571,064 | Outdoor | TLS + UAV | 9/9 | 1 |
| 8_SMV_chapel_28 | 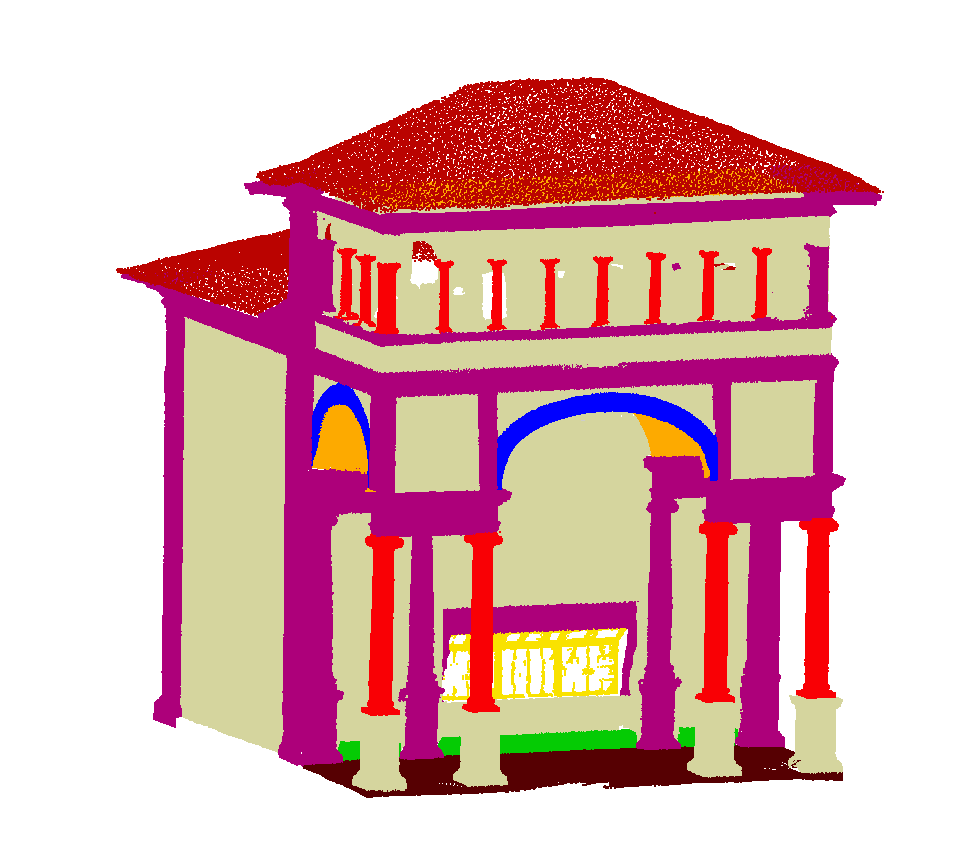 | 3,156,753 | Outdoor | TLS + UAV | 9/9 | 1 |
| 9_SMV_chapel_10 |  | 2,193,189 | Indoor/Outdoor | TLS + UAV | 6/9 | 1 |
| 10_SStefano_portico_1 | 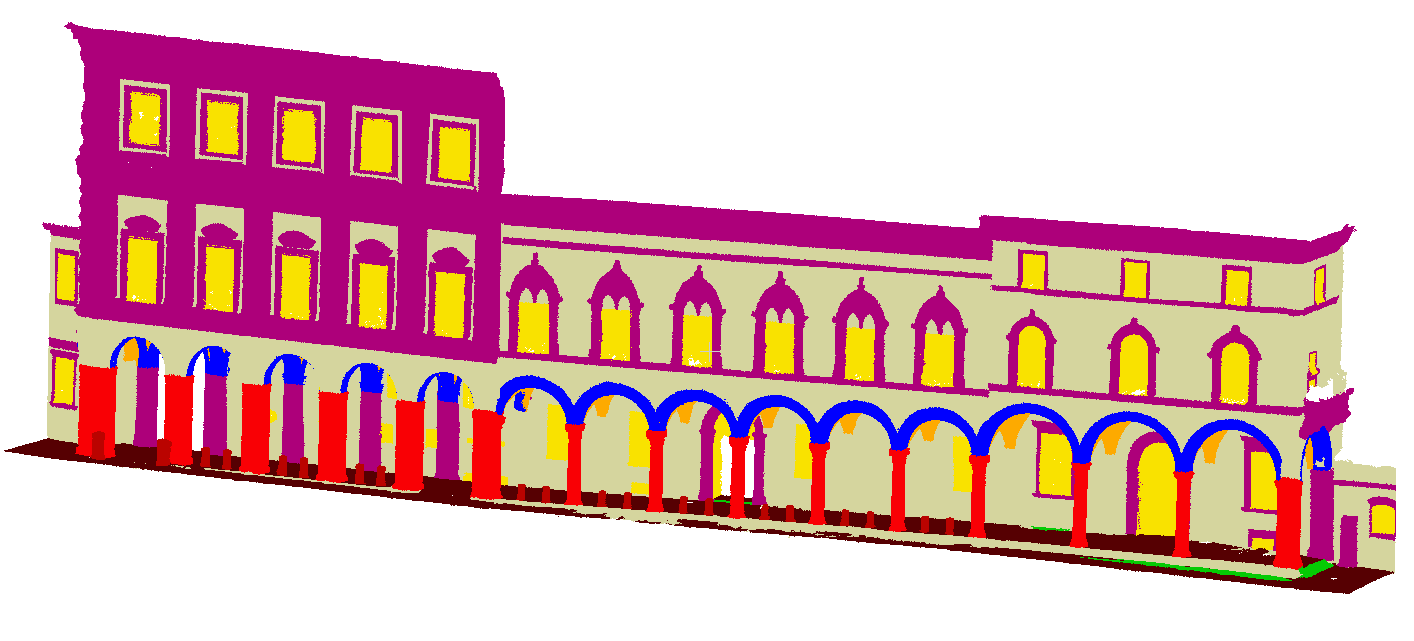 | 3,783,699 | Outdoor | Terrestrial photogrammetry | 8/9 | 1 |
| 11_SStefano_portico_2 |  | 10,047,392 | Outdoor | Terrestrial photogrammetry | 8/9 | 1 |
| 12_KAS_pavillion_1 |  | 598,384 | Indoor/Outdoor | TLS | 4/9 | 1 |
| 13_KAS_pavillion_2 | 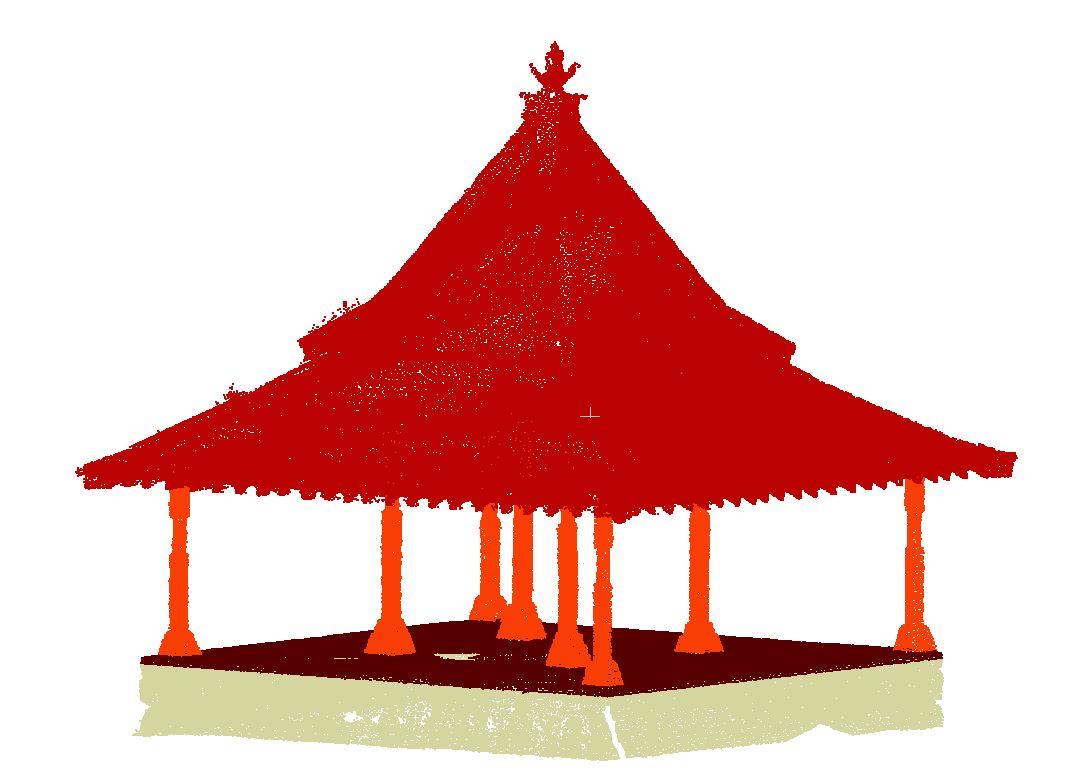 | 325,822 | Indoor/Outdoor | TLS | 4/9 | 1 |
| 14_TRE_square |  | 9,409,239* | Outdoor | Terrestrial photogrammetry | 8/9 | 1.5 |
| 15_OTT_church |  | 13,302,903* | Indoor/Outdoor | TLS | 9/9 | 1.5 |
| TOTAL (million) | 102,139,969 |
Test
| Name | Preview | N. of points | Scene | Data acquisition | Number of classes (excluded “other”) | Subsampling (cm) |
|---|---|---|---|---|---|---|
| A_SMG_portico | 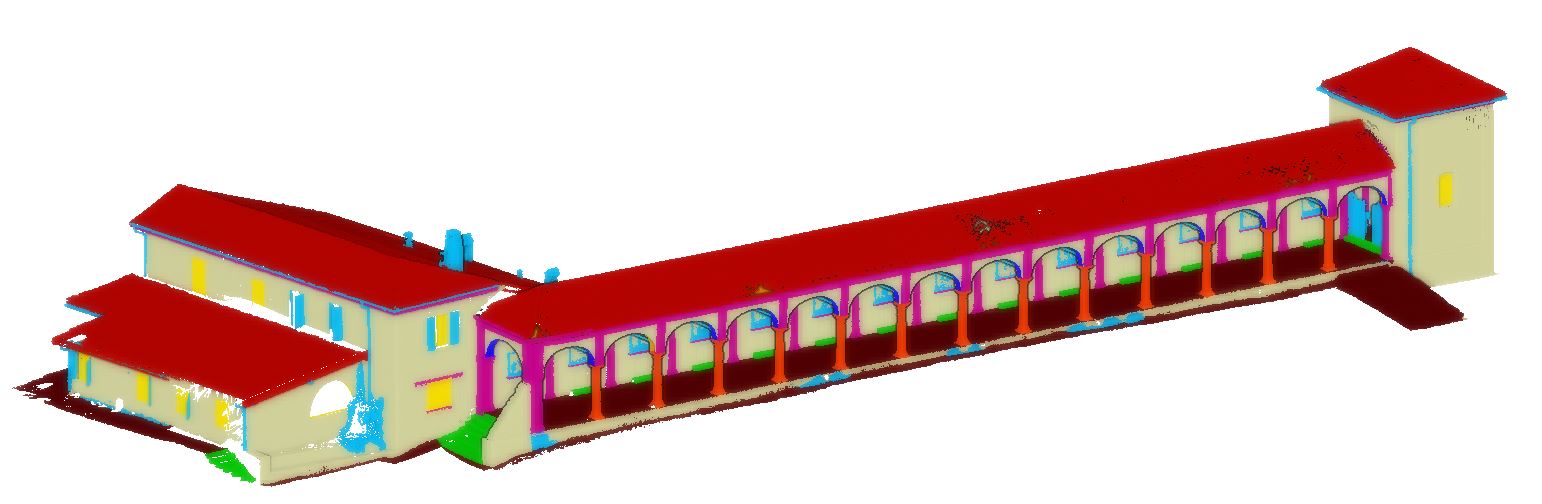 | 17,798,012* | Outdoor | TLS + UAV | 9/9 | 1 |
| B_SMV_chapel_27to35 |  | 16,200,442 | Indoor/Outdoor | TLS + UAV | 9/9 | 1 |
| TOTAL (million) | 33,998,454 |