What do we provide?
We provide both labelled training and test scenes.
The point clouds you will receive have been:
- spatially translated. The coordinate values had too many digits to be processed by the neural networks, so they have been truncated and every single scene is spatially moved close to the system origin (0,0,0);
- subsampled, due to the high number of points (mostly redundant) in each scene (> 20M points). A minimum space of 1 cm between points is set. For fewer cases, where the number of points was too high, a space of 1.5 cm has been set.
Point normals have been computed on CloudCompare, most of the time with a plane local surface model and oriented with a minimum spanning tree with Knn=10. The orientation of the normals was then checked in MATLAB®.
Hence, the point cloud structure is:
x, y, z, r, g, b, label, Nx, Ny, Nz
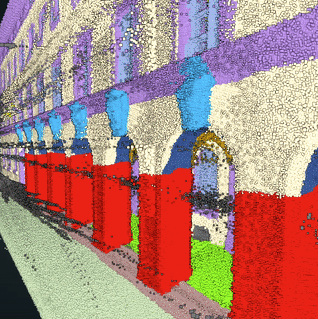
In the label column of the ground truth, you will find numbers from 0 to 9, corresponding to the 10 classes. The tithe, “other”, contains all the points not belonging to the previous classes (e.g. paintings, altars, benches, statues, waterspouts…). Therefore, we suggest you do not use it, as it could be misleading for the neural networks.
"arch":0, "column":1, "moldings":2, "floor":3, "door_window":4, "wall":5, "stairs":6, "vault":7, "roof":8, "other":9
Download
To download the dataset, please fill in this form https://forms.gle/tUzjpsXMFYNRGDdY6
Once compiled, you will receive the name of the Host, a Username and a temporary Password to login into our FTP (File Transfer Protocol) server. To access we suggest you use FETCH FTP software for MAC or FileZilla FTP software for Windows.
Once you have your results, you can upload them here and we will publish them on the Results page.
Visit also…
If you are interested in heritage point clouds datasets, visit also the TUM – FAÇADE dataset webpage at this link, by Olaf Wysocki.